4 years, 10 months ago
/
Categories:
Research Highlights
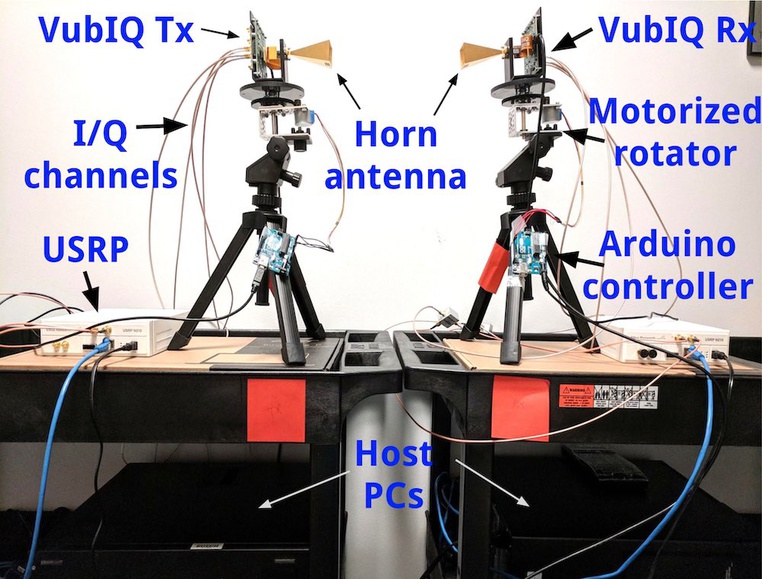
Intelligent high frequency wireless networks for next generation communication.

4 years, 10 months ago
/
Categories:
Research Highlights
A new approach leads to more accurate data classification with less training data and more privacy.

4 years, 10 months ago
/
Categories:
Research Highlights
An asymptotically more efficient solution allows sensitive information, like hospital records, to stay secure.
4 years, 10 months ago
/
Categories:
Research Highlights
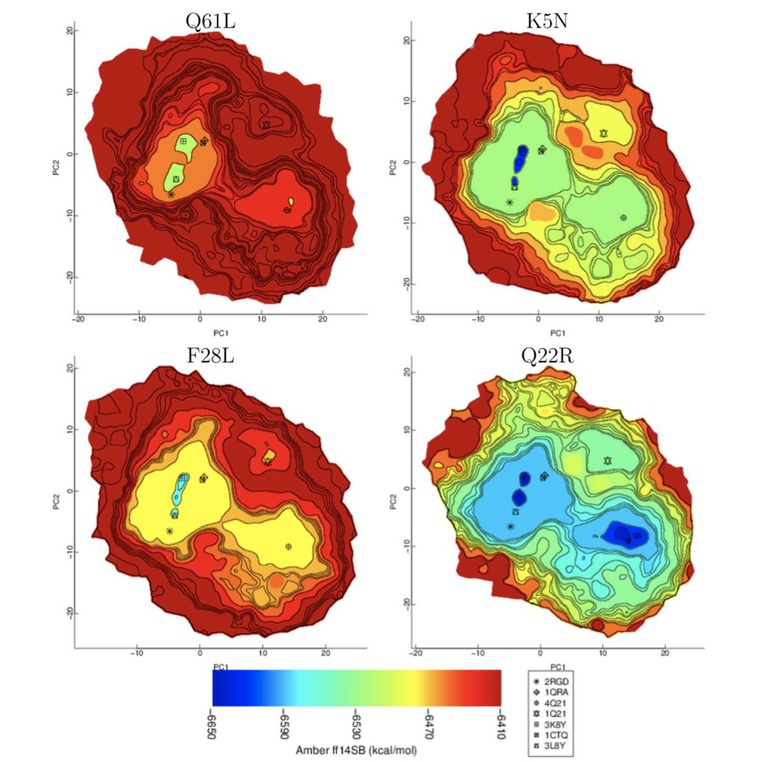
A new model visualizes protein molecular landscapes and identifies functional—and dysfunctional—structures.
4 years, 10 months ago
/
Categories:
Research Highlights
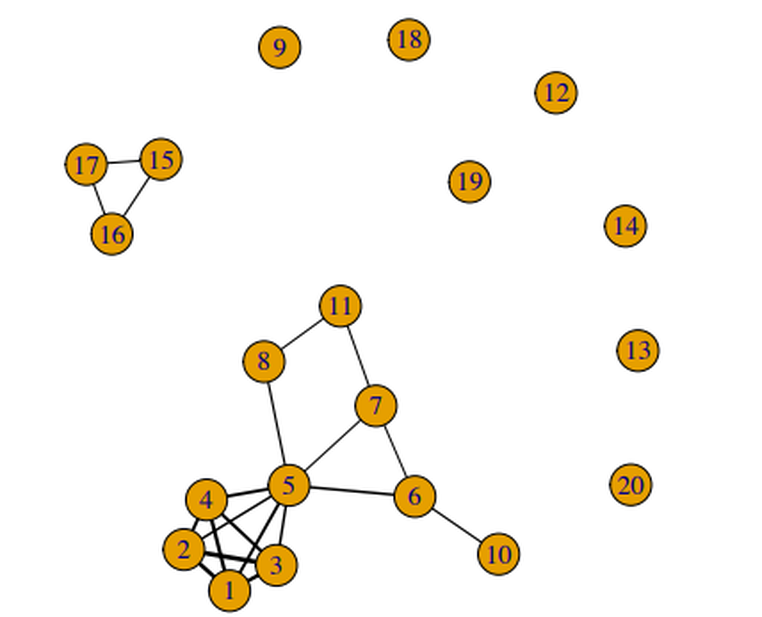
A graph-based method could improve the robustness of finding outliers in data sets, like fraudulent transactions on your credit card bill.