Constraints-Based Complex Behavior in Rich Environments
 |
Jan M. Allbeck and Hadas Kress-Gazit
In Proceedings of the 10th International Conference on Intelligent Virtual Agents, Springer, 2010, pages 1-14.
Abstract
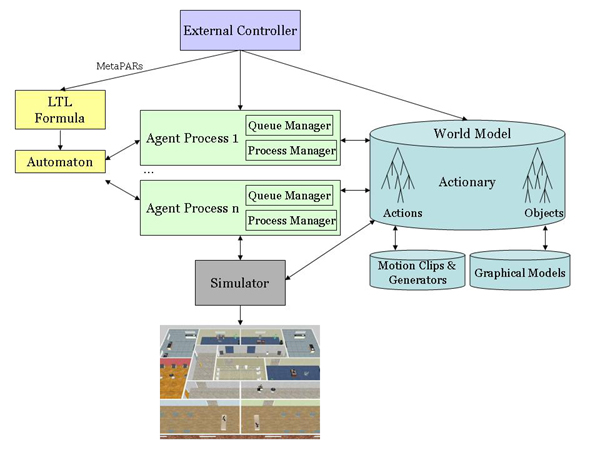
In order to create a system capable of planning complex, constraints-based behaviors for an agent operating in a rich environ ment, two complementary frameworks were integrated. Linear Temporal Logic mission planning generates controllers that are guaranteed to sat isfy complex requirements that describe reactive and possibly in nite be haviors. However, enumerating all the relevant information as a nite set of Boolean propositions becomes intractable in complex environments. The PAR (Parameterized Action Representation) framework provides an abstraction layer where information about actions and the state of the world is maintained; however, its planning capabilities are limited. The integration described in this paper combines the strengths of these two frameworks and allows for the creation of complex virtual agent behav ior that is appropriate to environmental context and adheres to specifed constraints.
Paper (pdf)
Videos
Images
 |
 |
 |
 |
 |
 |
 |
 |