Research
|
Selected publications
(A full list of my publications)
|



|
Computational Origami & Kirigami (see details)
Computational kirigami wrapping: a universal method to wrap 3D-curved surfaces beyond materiality,
Lee and Xi et al., Science Advances, April 10, 2020
(paper)
Computational Laser Forming Origami of Convex Surfaces, Yue Hao and Jyh-Ming Lien, Proceedings of the ACM Symposium on Computational Fabrication (SCF), Jun 2019
(paper) (project page)
Creating Foldable Polyhedral Nets Using Evolution Control, Yue Hao and Yun-Hyeong Kim and Zhonghua Xi and Jyh-Ming Lien, Proceedings of the Robotics: Science and Systems Conference (RSS), Jun. 2018
(paper) (project page)
Learning to Segment and Unfold Polyhedral Mesh from Failures, Zhonghua Xi and Yun-Hyeong Kim and Young J. Kim and Jyh-Ming Lien, Shape Modeling International (SMI), Jun. 2016; also appears in Journal of Computers & Graphics.
(paper) (project page)
Folding and Unfolding Origami Tessellation by Reusing Folding Path, Zhonghua Xi and Jyh-Ming Lien, 2015 IEEE International Conference on Robotics and Automation (ICRA), May. 2015
(paper) (project page)
Plan Folding Motion for Rigid Origami via Discrete Domain Sampling, Zhonghua Xi and Jyh-Ming Lien, 2015 IEEE International Conference on Robotics and Automation (ICRA), May. 2015
(paper) (project page)
Folding Rigid Origami with Closure Constraints, Zhonghua Xi and Jyh-Ming Lien, International Design and Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), ASME, Aug. 2014
(paper) (project page) (software)
|
|
|
Algorithmic Robotics and Motion Planning (see details)
Computing 3D From-Region Visibility Using Visibility Integrity, Jixuan Zhi and Yue Hao and Christopher Vo and Marco Morales and Jyh-Ming Lien, IEEE Robotics and Automation Letters (RAL), 2019.
(project page)
Online Collision Prediction Among 2D Polygonal and Articulated Obstacles, Yanyan Lu, Zhonghua Xi and Jyh-Ming Lien, International Journal of Robotics Research (IJRR), 2015.
(project page) (source code) (video)
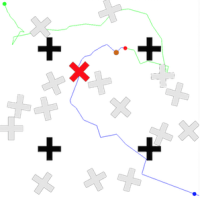
Planning Motion in Similar Environments, Jyh-Ming Lien and Yanyan Lu, in the Proceedings of
the Robotics: Science and Systems Conference (RSS), Seattle, Washington, Jun. 2009.
(paper) (project page)
Hybrid Motion Planning Using Minkowski Sums, Jyh-Ming Lien, in the Proceedings of the Robotics:
Science and Systems Conference (RSS), Zurich, Switzerland. Jun. 2008.
(paper) (project page)
|
|
|
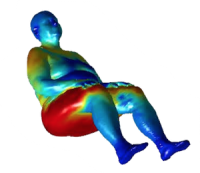
Shape Segmentation and Analysis Methods (see details)
Continuous Visibility Feature, Guilin Lu, Yotam Gingold, and Jyh-Ming Lien, in the Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2015, Boston, MA, USA
(paper) (project page) (source code)
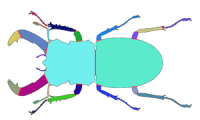
Dual-Space Decomposition of 2D Complex Shapes, Guilin Liu and Zhonghua Xi and Jyh-Ming Lien, 27th IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, Jun. 2014
(paper) (project page) (source code)
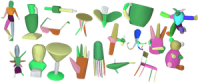
Approximate Convex Decomposition of Polyhedra and Its Applications, Jyh-Ming Lien and Nancy Amato, Computer Aided Geometric Design (CAGD), 25(7), pp. 503~522, 2008.
(paper) (project page)
Approximate Convex Decomposition for Polygons, Jyh-Ming Lien and Nancy M. Amato, Computational Geometry: Theory & Applications (CGTA), Vol. 35, pp. 100–123, 2006.
(paper) (project page) (source code)
|
|
|
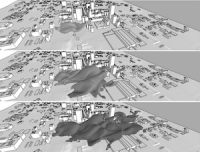
Mesh Processing and Repair
Fast and Robust Generation of City-Scale Seamless 3D Urban Models, Yanyan Lu, Evan Behar, Stephen Donnelly, Jyh-Ming Lien, Fernando Camelli, and David Wong, Computer-Aided Design (CAD), volume 43, issue 11. Also in the Proc. of SIAM Conference on Geometric and Physical Modeling (GD/SPM), Orlando, Florida, Oct. 2011. Nominated for best paper award (6/72 papers)
(paper) (project page)
|
|

|
Minkowski sum (see details)
A Simple Method for Computing Minkowski Sum Boundary in 3D Using Collision Detection, Jyh-Ming Lien, Algorithmic Foundations of Robotics VIII (WAFR), pp. 400~416, Springer, 2010.
(paper) (project page) (source code)
Covering Minkowski Sum Boundary Using Points with Applications, Jyh-Ming Lien, Computer Aided Geometric Design (CAGD), 25(8), pp. 652~666, 2008. Listed by CAGD as one of the most cited papers since 2007.
(paper) (project page) (source code)
|
|
|
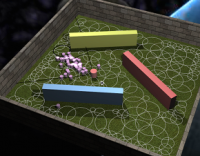
Group Control and Monitoring (see details)
Following a Large Unpredictable Group of Targets Among Obstacles, Christopher Vo and Jyh-Ming Lien, Proceedings of the Third International Conference on Motion in Games (MIG), Springer, 2010
(paper) (project page)
Shepherding Behaviors with Multiple Shepherds, Jyh-Ming Lien, Samuel Rodriguez, Jean-Philippe Malric, Nancy M. Amato, In Proc. IEEE International Conference on Robotics and Automation (ICRA), pp. 3402-3407, Apr 2005.
(paper) (project page)
|
Publications
|
 Contact info:
Contact info: