Multiview RGB-D Dataset for Object Instance Detection
Abstract
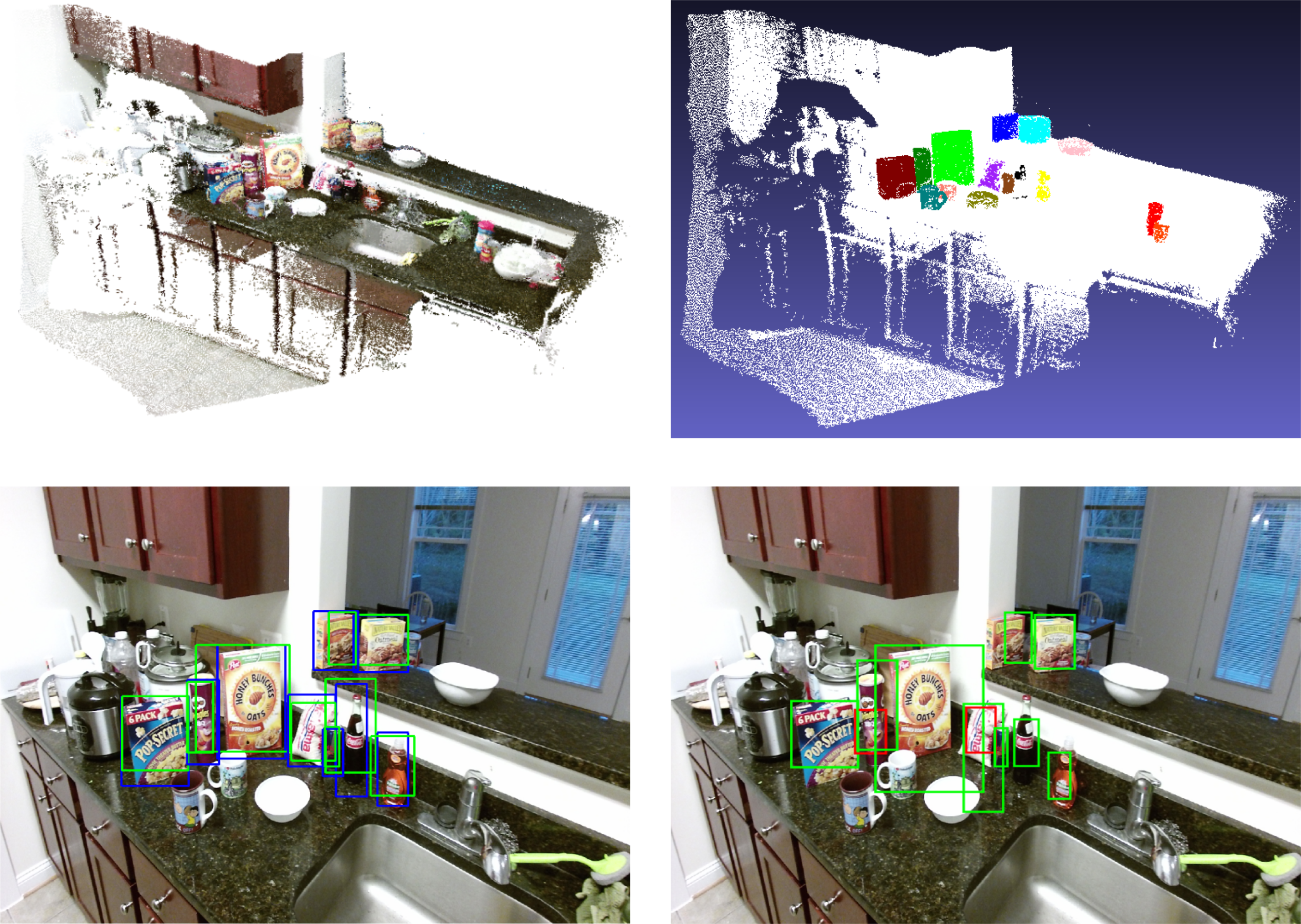
This paper presents a new multi-view RGB-D dataset of nine kitchen scenes,
each containing several objects in realistic cluttered environments including a
subset of objects from the BigBird dataset. The viewpoints of the scenes are
densely sampled and objects in the scenes are annotated with bounding boxes and
in the 3D point cloud. Also, an approach for detection and recognition is presented,
which is comprised of two parts: i) a new multi-view 3D proposal generation method and
ii) the development of several recognition baselines using AlexNet to score our
proposals, which is trained either on crops of the dataset or on synthetically composited
training images. Finally, we compare the performance of the object proposals and a detection
baseline to the Washington RGB-D Scenes (WRGB-D) dataset and demonstrate that our Kitchen
scenes dataset is more challenging for object detection and recognition.
Paper
Georgios Georgakis, Md Alimoor Reza, Arsalan Mousavian, Phi-Hung Le, Jana Kosecka
Multiview RGB-D Dataset for Object Instance Detection
[paper, supplementary]
International Conference on 3DVision (3DV) 2016
Contents
- 9 RGB-D kitchen video sequences with 1920x1080 resolution.
- Camera pose information for each frame in all scenes.
- Dense 3D point clouds for each scene.
- 10-15 object instances per scene.
- 23 object instances in total across scenes. 11 are from the BigBird dataset, and the rest are common objects such as bowls and coffee mugs.
- Bounding box annotations for all objects in the RGB-D frames.
- 3D point labeling for each scene.
For more details please see the README files that are included in the data links.
For any questions please email: ggeorgak@gmu.edu
Data
Scripts
Transform 3D world coordinates to image coordinates: world2img.m
Transform a depth image into 3D world coordinates: depth2world.m
Scales for mapping the depth image values to the z dimension in COLMAP: scales.txt
Acknowledgments
We acknowledge support from NSF NRI grant 1527208.
Some of the experiments were run on ARGO, a research
computing cluster provided by the Office of Research
Computing at George Mason University, VA. (URL: http://orc.gmu.edu).