 |
|
 |
 |
 |
|
|
 |
 |
 |
| 2004 - 2010 | 2010 - 2013 | June-Aug 2015 | June-Aug 2016 | June-Aug 2017 | Aug 2017 - May 2018 | 2013 - 2018 | 2018 - now |
I am a senior research scientist at NVIDIA Seattle Robotics
Lab. I am interested in using computer vision and 3D vision for robotics tasks such as object manipulation. At
the moment, I am mainly working on model-free object manipulation in unconstrained environments. In addition, I am
interested in 6D pose estimation of objects, instance segmentation, and recognition from RGB-D images. Prior to
NVIDIA, I finished my PhD in Computer Science
department at George Mason University
where I was working under the supervision of Prof. Jana Kosecka. During
my PhD, I worked on a variety of computer vision problems for robot perception such as: vision based navigation,
object pose estimation, object detection, semantic segmentation and image based localization. I was fortunate to
work with amazing collaborators in different research groups in industry. I did internships at Google Brain
Robotics, Zoox, and Google StreetView during my PhD. Prior to my PhD, I got my masters in AI and Robotics from
University of Tehran.
News:
- March 2022: 1 paper on zero-shot object rearrangement accepted to CVPR 2022.
- September 2021: 3 papers accepted to CoRL.
- July 2021: Got promoted to Senior Robotics Research Scientist.
- June 2021: Our paper on Reactive Human-to-Robot Handovers of Arbitrary Objects won the best paper award on Human Robot Interaction at ICRA 2021.
- June 2021: 1 paper accepted to IROS 2021.
- May 2021: 1 paper accepted to RSS 2021.
- March 2021: 1 paper accepted to CVPR 2021.
- March 2021: 5 papers accepted to ICRA 2021.
- September 2020: Our paper on instance sementation of unknown objects is accepted to CoRL 2020.
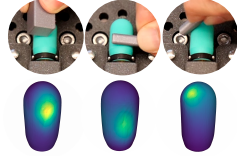
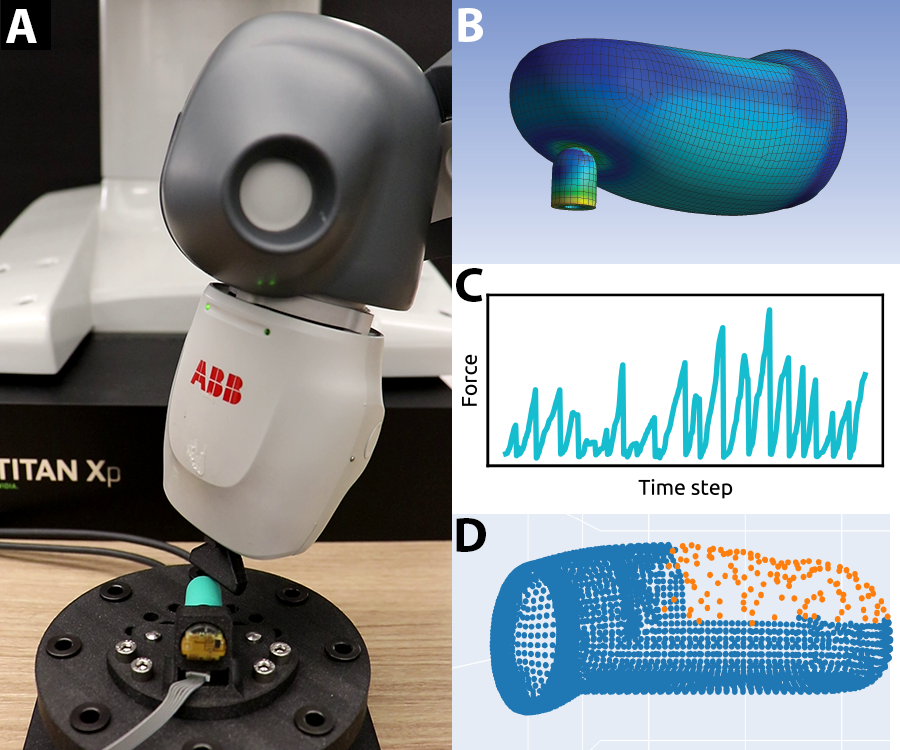
- May 2020: Our paper on interpreting signals from touch sensors is accepted to RSS 2020.
- May 2020: Our paper on grasping unkonwn objects in clutter is nominated for Best Robot Manipulation and Student Paper award.
- February 2020: Our paper on zero-shot pose estimation is accepted to CVPR 2020.
- January 2020: 2 papers accepted to ICRA 2020.
- October 2019: got promoted to Senior Robotics Research Scientist.
- September 2019: Our paper on evaluating different grasp sampling schemes is accepted to ISRR 2019.
- September 2019: Our paper on instance segmentation for unknown object got accepted to CoRL 2019.
- July 2019: Our paper on 6-DOF grasping of unknown objects got accepted to ICCV 2019.
- May 2019: Our paper got accepted to RSS 2019.
- January 2019: Our paper got accepted to ICRA 2019.
- August 2018: Joined NVIDIA Robotics lab as Research Scientist.
- June 2018: I defended my dissertation and graduated from PhD program.
- May 2018: Received outstanding graduate student award in CS department.
- I will be joining Google Brain team as visiting researcher for academic year of 2017.
- April 2017: Our paper got accepted to RSS 2017 conference.
- February 2017: Our paper is covered by IEEE Spectrum and Forbes.
- February 2017: Our paper got accepted to CVPR 2017 conference.
- September 2016: Two papers got accepted in 3DV 2016 conference.
- March 2016: Second place in Computer Science PhD Symposium of George Mason University.
Publications:
 |
ProgPrompt: Generating Situated Robot Task Plans using Large Language Models
|
||
 |
MegaPose: 6D Pose Estimation of Novel Objects via Render & Compare
|
||
 |
Learning Robust Real-World Dexterous Grasping Policies via Implicit Shape Augmentation
|
||
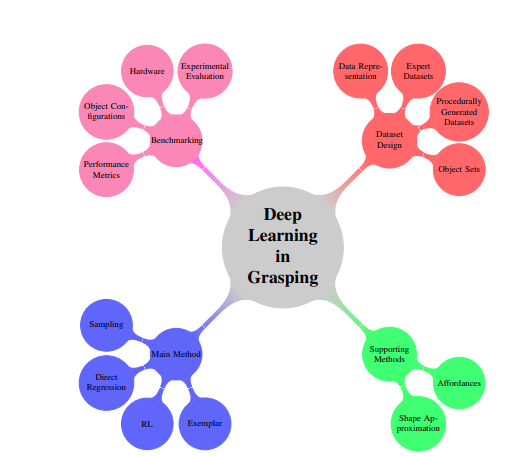 |
Deep Learning Approaches to Grasp Synthesis: A Review
|
||
 |
IFOR: Iterative Flow Minimization for Robotic Object Rearrangement
|
||
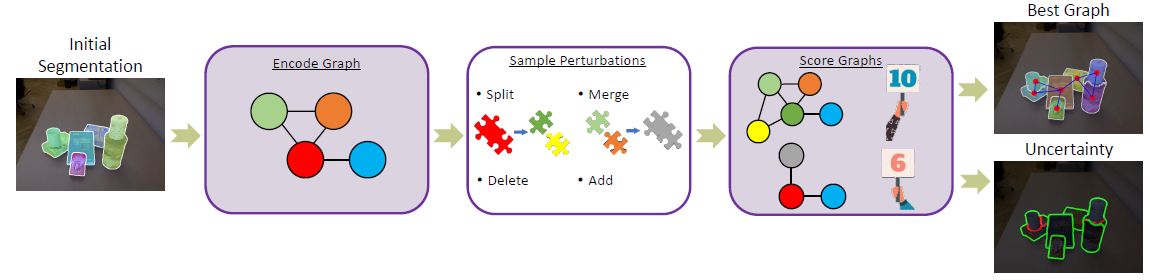 |
RICE: Refining Instance Masks in Cluttered Environments with Graph Neural Networks
|
||
 |
STORM: An Integrated Framework for Fast Joint-Space Model-Predictive Control for
Reactive
Manipulation
|
||
 |
Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds
|
||
|
NeRP: Neural Rearrangement Planning for Unknown Objects
|
||

|
Reactive Long Horizon Task Execution via Visual Skill and Precondition
Models
|
||
|
RGB-D Local Implicit Function for Depth Completion of Transparent
Objects
|
|||
 |
Contact-GraspNet: Efficient 6-DoF Grasp Generation in
Cluttered
Scenes
|
||
 |
Object Rearrangement Using Learned Implicit Collision
Functions
|
||
 |
Reactive Human-to-Robot Handovers of Arbitrary Objects
Best Human Robot Interaction
Paper |
||
 |
ACRONYM: A Large-Scale Grasp Dataset Based on
Simulation
|
||
 |
Sim-to-Real for Robotic Tactile Sensing via
Physics-Based
Simulation and Learned Latent Projections
|
||

|
Learning RGB-D Feature Embeddings for
Unseen
Object
Instance
Segmentation
|
||
|
Interpreting and Predicting Tactile
Signals
via a
Physics-Based and Data-Driven
Framework
|
||
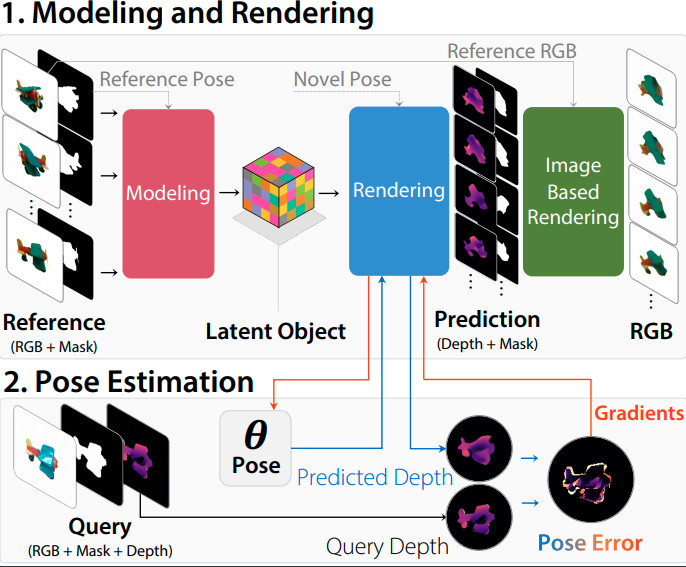 |
LatentFusion: End-to-End
Differentiable
Reconstruction
and Rendering for Unseen Object
Pose
Estimation
|
||
|
6-DOF Grasping for
Target-driven
Object
Manipulation in Clutter
Best Robot
Manipulation
Paper
Finalist |
||
|
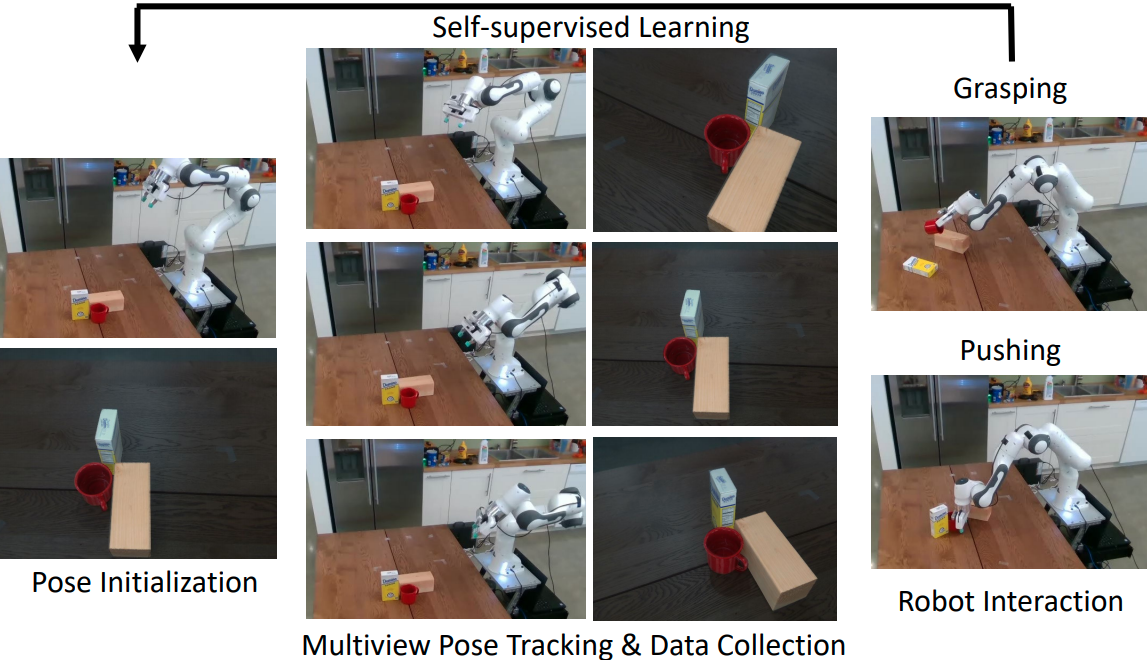
Self-supervised 6D Object
Pose
Estimation
for
Robot Manipulation
|
||
|
A Billion Ways to
Grasps -
An
Evaluation
of Grasp Sampling
Schemes
on a
Dense,
Physics-based Grasp
Data
Set |
||
|
The Best of Both
Modes:
Separately
Leveraging RGB and
Depth
for
Unseen
Object Instance
Segmentation
|
|||
|
6-DOF
GraspNet:
Variational
Grasp
Generation for
Object
Manipulation |
||
|
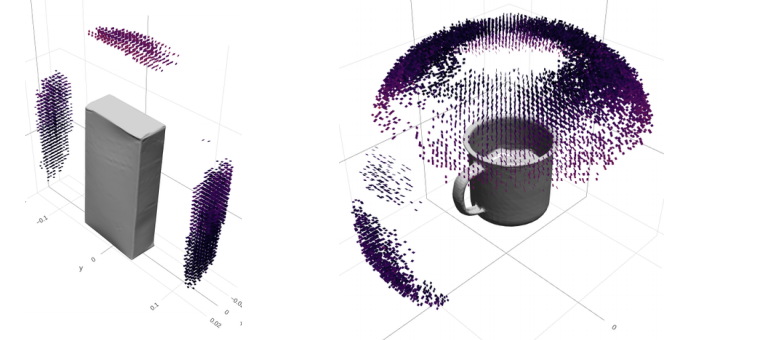
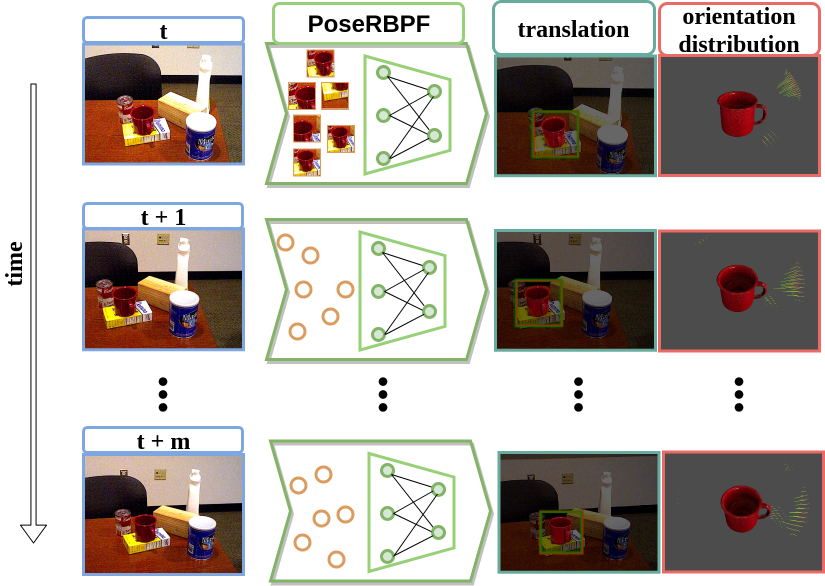
PoseRBPF:
A
Rao-Blackwellized
Particle
Filter for
6D Object
Pose
Tracking |
||

|
Visual
Represenatations
for
Semantic
Target
Driven
Navigation |
||

|
Synthesizing
Training
Data
for
Object
Detection
in
Indoor
Scenes |
||
|
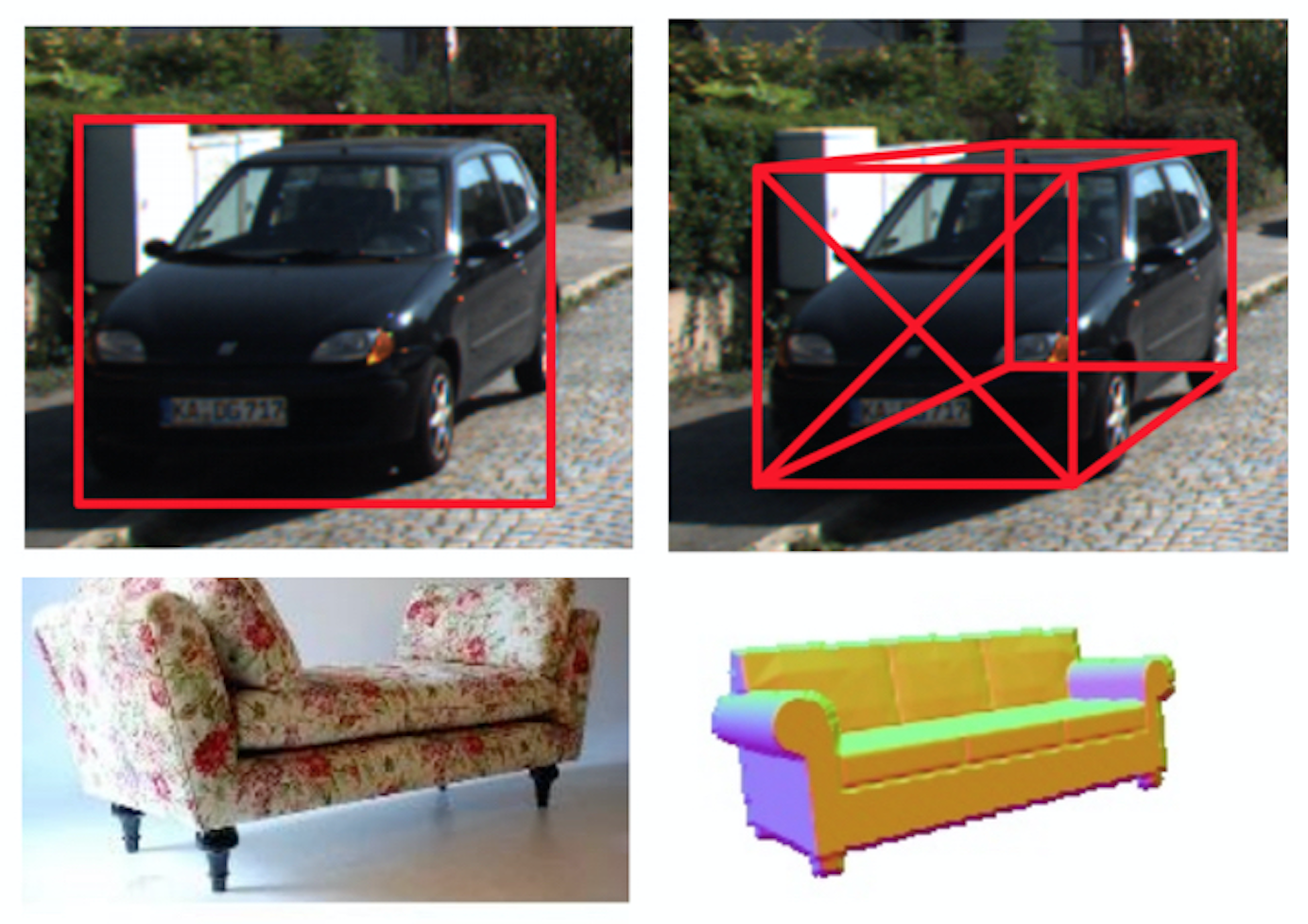
3D
Bounding
Box
Estimation
Using
Deep
Learning
and
Geometry |
||
|
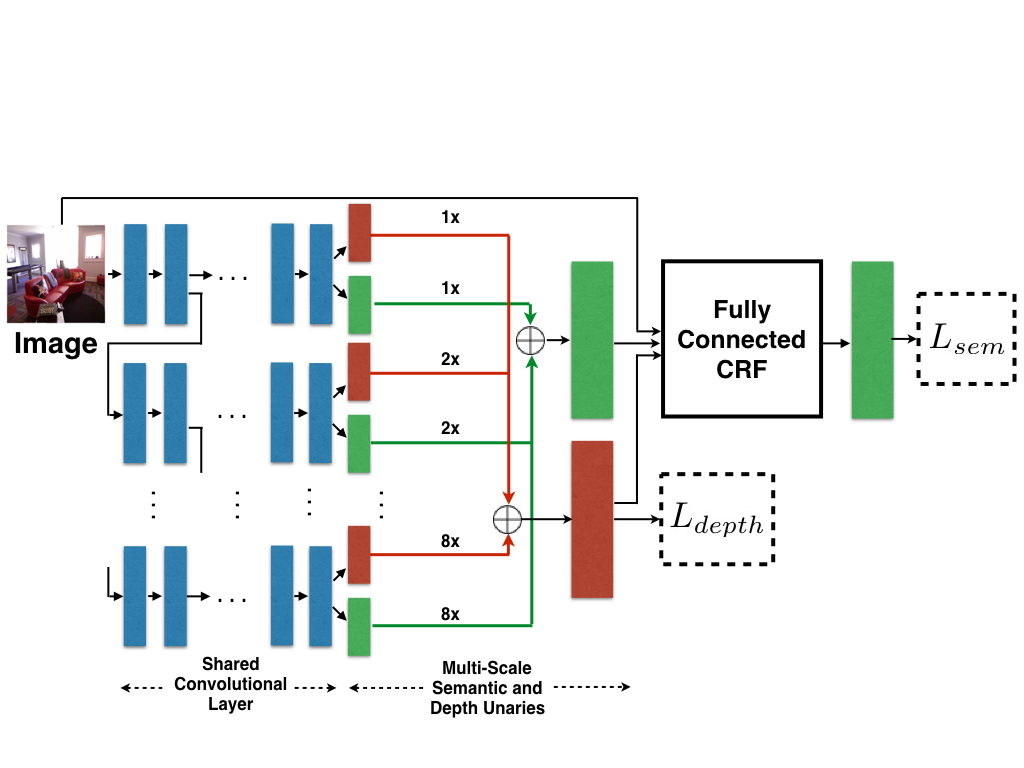
Joint
Semantic
Segmentation
and
Depth
Estimation
with
Deep
Convolutional
Networks |
||
|
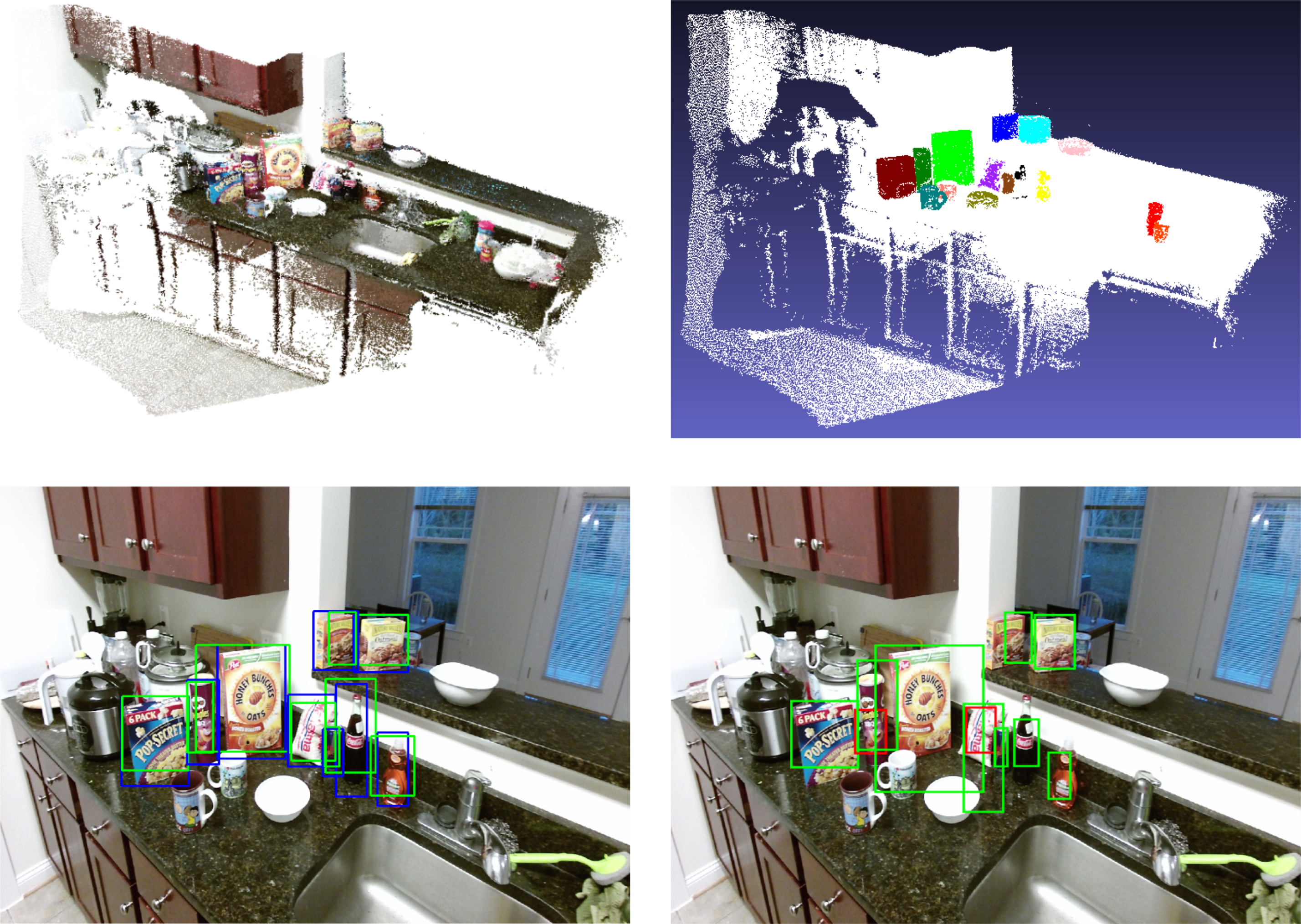
Multiview
RGB-D
Dataset
for
Object
Instance
Detection | ||
|
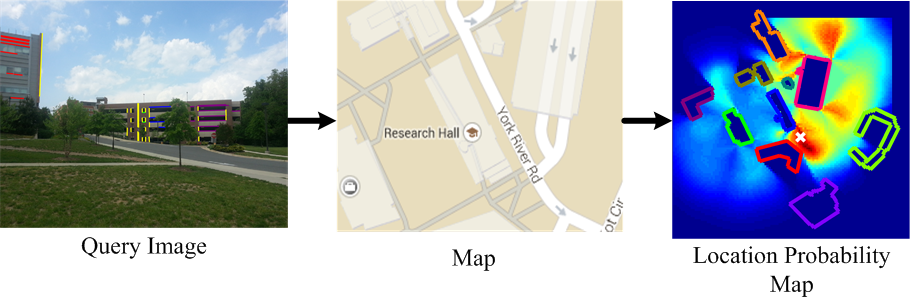
Semantic
Image
Based
Geolocation
Given
a
Map |
||
|
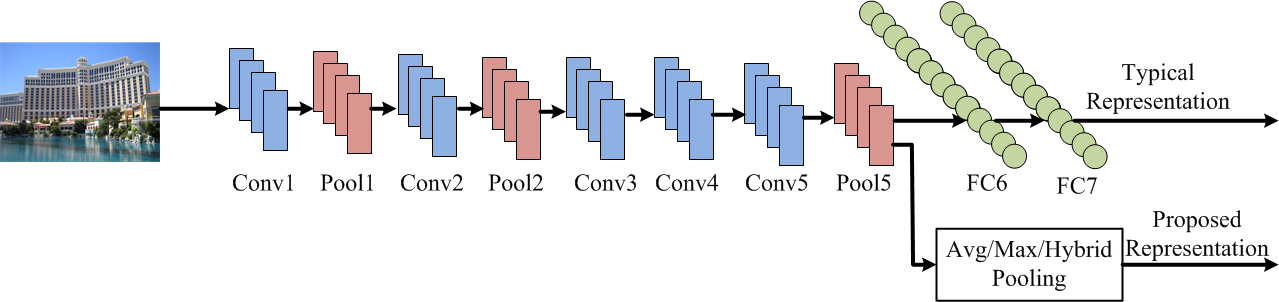
Deep
Convolutional
Features
for
Image
Based
Retrieval
and
Scene
Categorization |
||
|
Semantically
Guided
Location
Recognition
for
Outdoors
Scenes |
||

|
Semantically
Aware
Bag-of-words
for
Localization |
||