Ground Vehicles

Verti-Wheelers
|
The Verti-Wheelers (VWs) are two custom-built conventional wheeled vehicles, including a six-wheeled Verti-6-Wheeler (V6W) and a four-wheeled Verti-4-Wheeler (V4W). The open-sourced WWs aim at research in wheeled mobility in vertically challenging terrain, such as large boulders or fallen tree trunks. Both VWs only include minimal modification compared to conventional wheeled robots, but achieve seven desiderata to move through vertically challenging terrain: all-wheel drive, independent suspensions, differential lock, low/high gear, wheel speed/RPM sensing, ground speed sensing, and actuated perception. Two datasets of V6W and V4W are available on GMU Dataverse to facilitate data-driven mobility. Involved Projects: [Verti-Wheelers]
|

Jackal
|
Jackal is a small, fast, differential-drive field robotics research platform. It has an onboard computer, GPS, IMU, LiDAR, and RGB-D camera fully integrated with ROS for autonomy research. In RobotiXX lab, Jackal is the main research platform for agile navigation in highly constrained obstacle environments. Involved Projects: [APPL] [LfH] [BARN]
|

Husky
|
Husky is awarded by Robotics@Google (thank you R@G!). The Husky is a medium sized, differential-drive, robotic development platform with a large payload capacity and power systems to accommodate an extensive variety of payloads. The Husky works alongside with XX-Men mainly in outdoor, off-road conditions in the wild.
|

Hunter SE
|
Hunter SE is a high-speed (up to 4.8m/s), Ackermann-steering platform for research on aggressive ground maneuvers. The XX-Men drive the Hunter SE (or more precisely, the Hunter SE drives itself with the XX-Men's help) close to its physical limit on unstructured, off-road terrain. The Hunter SE learns vehicle-terrain interactions through self-supervised experiences and gradually increases its autonomous driving speed in the wild.
|

2 X Fetch Mobile Manipulators
|
The two Fetch Mobile Manipulators are awarded by Robotics@Google (thank you R@G!). The Fetch robots are purposefully designed for typical human working environments. Being similar to the robots at Everyday Robots, XX-Men work with the two Fetches on collaborative navigation and manipulation research.
|

2 X Go1
|
The two Go1s are medium-scale quadruped robots designed for locomotion research. Equipped with multiple stereo cameras and ultrasonic sensors all around the torso, motor encoders in the twelve joints, pressure sensors on the foot pads, plus a 3D LiDAR on the top, the Go1s move through their surrounding environments, no matter how challenging they are. In addition to petting the Go1s during spare time, XX-Men mainly work with them on agile quadruped locomotion in challenging spaces, such as on unstructured terrain or in confined 3D spaces.
|

4 X Pupper
|
Pupper is a small-scale quadruped, designed for both education and research, to empower students with easily accessible, state-of-the-art quadruped robots. We also use four Puppers to engage with high-school and other K-12 studnets. We are designing a robotics class around Pupper, in which students will build Puppers from scratch, to teach students mechatronics, Artificial Intelligence, and Robotics. While we are still building more Puppers, the RobotiXX lab sincerely thanks Hands-On Robotics for donating our first Pupper platform to us.
|

Spot
|
Spot is an agile quadrupedal mobile robot that navigates terrain with unprecedented mobility. Our Spot is also equipped with a 6-DoF arm to manipulate objects, open doors, etc. Professor XX has also worked with the Spot from AMRL during his time at UT Austin, in collaboration with the City of Austin to use Spot, alongside with Jackal and Husky, for inspection of city infrastructure via peripheral perception. Involved Projects: [TOCPUR]
|
AlphaTruck
|
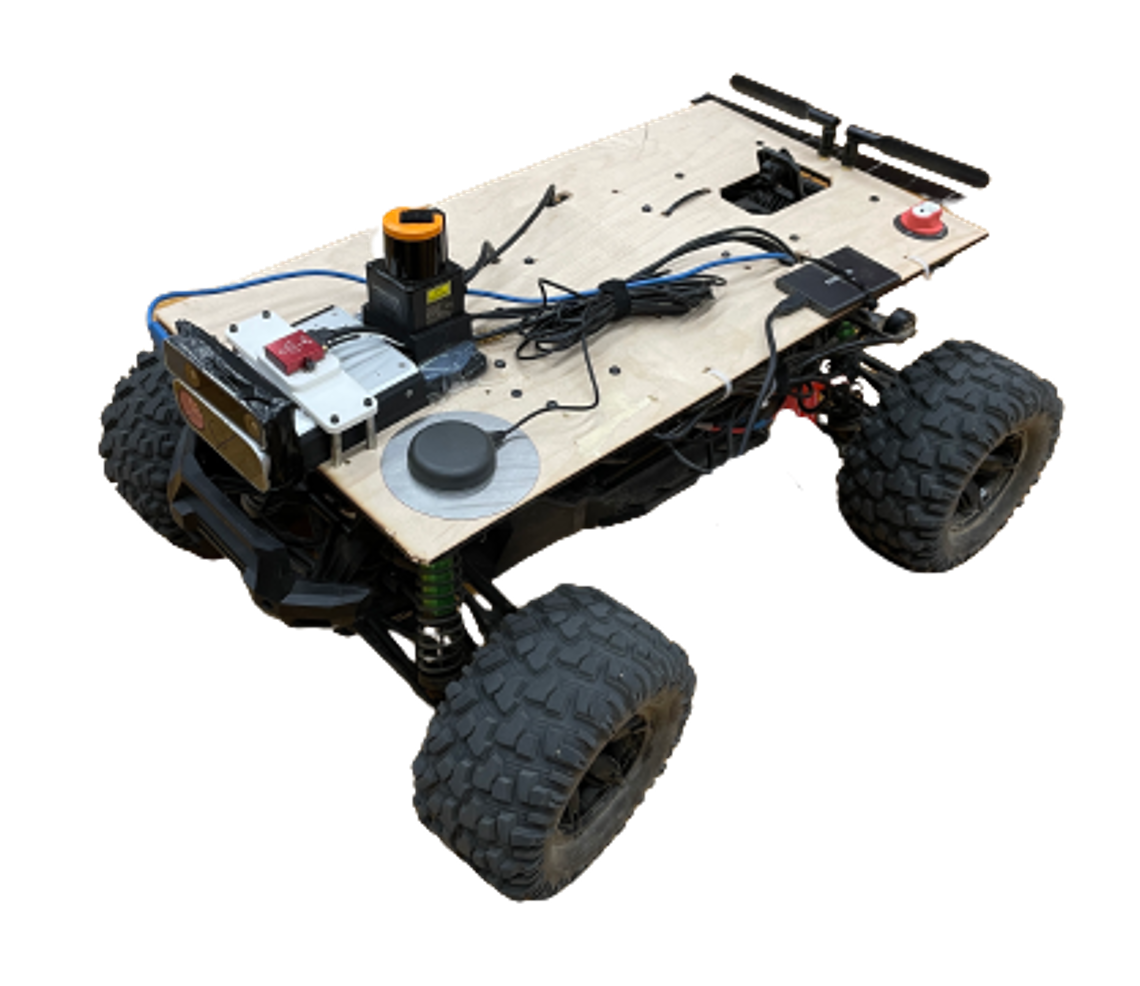
AlphaTruck is one of the custom-built off-road vehicle fleet in RobotiXX lab. This 1/5 scale truck, along with other 1/10 vehicles in the fleet, are the main research platform for accurate, high-speed, off-road navigation research. Involved Projects: [IMU-IKD] [VI-IKD] [Optim-FKD]
|

UT-AUTOmata
|
UT-AUTOmata are a fleet of 1/10 autonomous vehicles built at AMRL at UT Austin. Professor XX worked with one of the UT-AUTOmata during his time at UT Austin on high-speed off-road navigation and then built the AlphaTruck (see above), as the only 1/5 vehicle in the fleet (hence the name "Alpha"). Involved Projects: [IMU-IKD] [VI-IKD] [Optim-FKD]
|

Packbot
|
PackBot 510 is a man-transportable robot that performs bomb disposal, surveillance and reconnaissance, CBRN detection and HazMat handling operations. PackBot 510 easily climbs stairs and navigates narrow passages, relaying real-time video, audio and sensor data while the operator stays at a safer, standoff distance. Professor XX worked with Packbot during his time at Texas A&M University, as his main research platform for search and rescue in unstructured or confined environments. Involved Projects: [Tethered Visual Assistance] [Viewpoints]
|
Aerial Vehicles

Fotokite
|
Fotokite is a tethered Unmanned Aerial Vehicle equipped with RGB cameras. Being attached to the ground with a tether, Fotokite draws power from the tether and has long flight duration. The tether can also be used for retrieval during a crash. During his time at Texas A&M University, Professor XX worked with Fotokite as his main research platform for tethered flight in unstructured or confined environments, with the focus of visual assistance when being paired with and tethered to a mobile Unmanned Ground Vehicle, i.e., Packbot (see above). Involved Projects: [Tethered Visual Assistance] [Tethered Motion Planning] [Tethered Visual Servoing] [Tethered Indoor Localization] [Tethered Motion Primitives] [Risk Awareness] [Autonomous Water Rescue]
|
Water Vehicles

Emily
|
Emily is a 1.2m long remote controlled or autonomous buoy, which can cruise through rip-currents and swift water at speeds up to 35 km/h to reach distressed swimmers faster than a swimming human lifeguard. For propulsion, EMILY uses a steerable jet pump with inlet grate, which is not only safer for the victims than an external propeller but also avoids binding up on rocks or sand. Emily is the main research platform for autonomous water surface navigation during Professor XX's time at Texas A&M University, especially in tandem with an aerial partner, i.e., Fotokite (see above). Involved Projects: [Autonomous Water Rescue]
|
XX-Bot Teams
Spot-Husky-Jackal Team
|
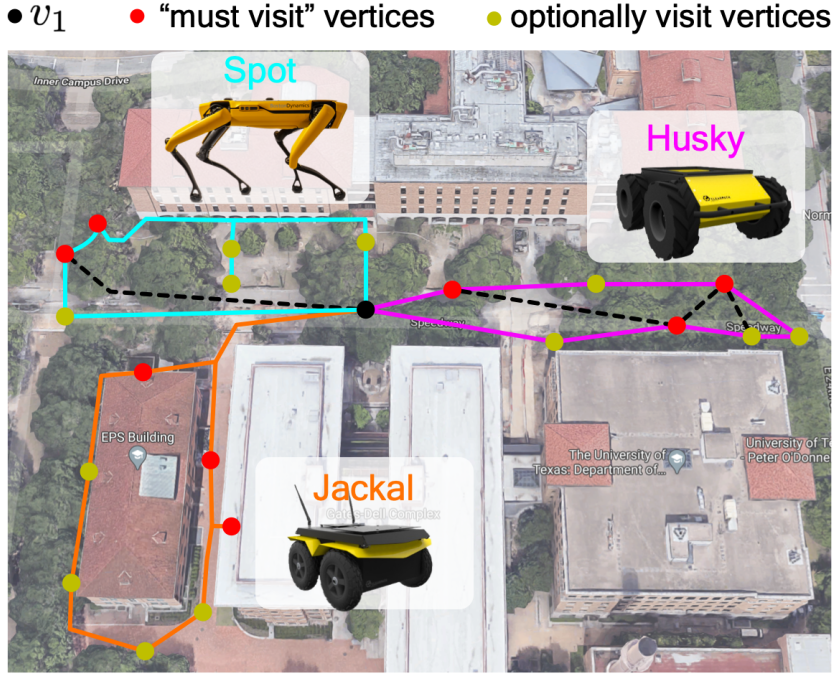
This heterogeneous UGV team is composed of Spot, Husky, and Jackal. As part of the Good Systems - Bridging Barriers effort at UT Austin and in collaboration with the City of Austin, this UVG team is tasked to inspect city infrastructure via peripheral perception: Spot is able to traverse stairs and get to places where the wheeled Spot and Husky cannot; Husky can carry heavy payload for specialized inspection tasks; Jackal is small, being able to fit into tight spaces, and fast, being able to finish urgent inspection tasks. Involved Projects: [TOCPUR]
|
UAV-UGV Team
|
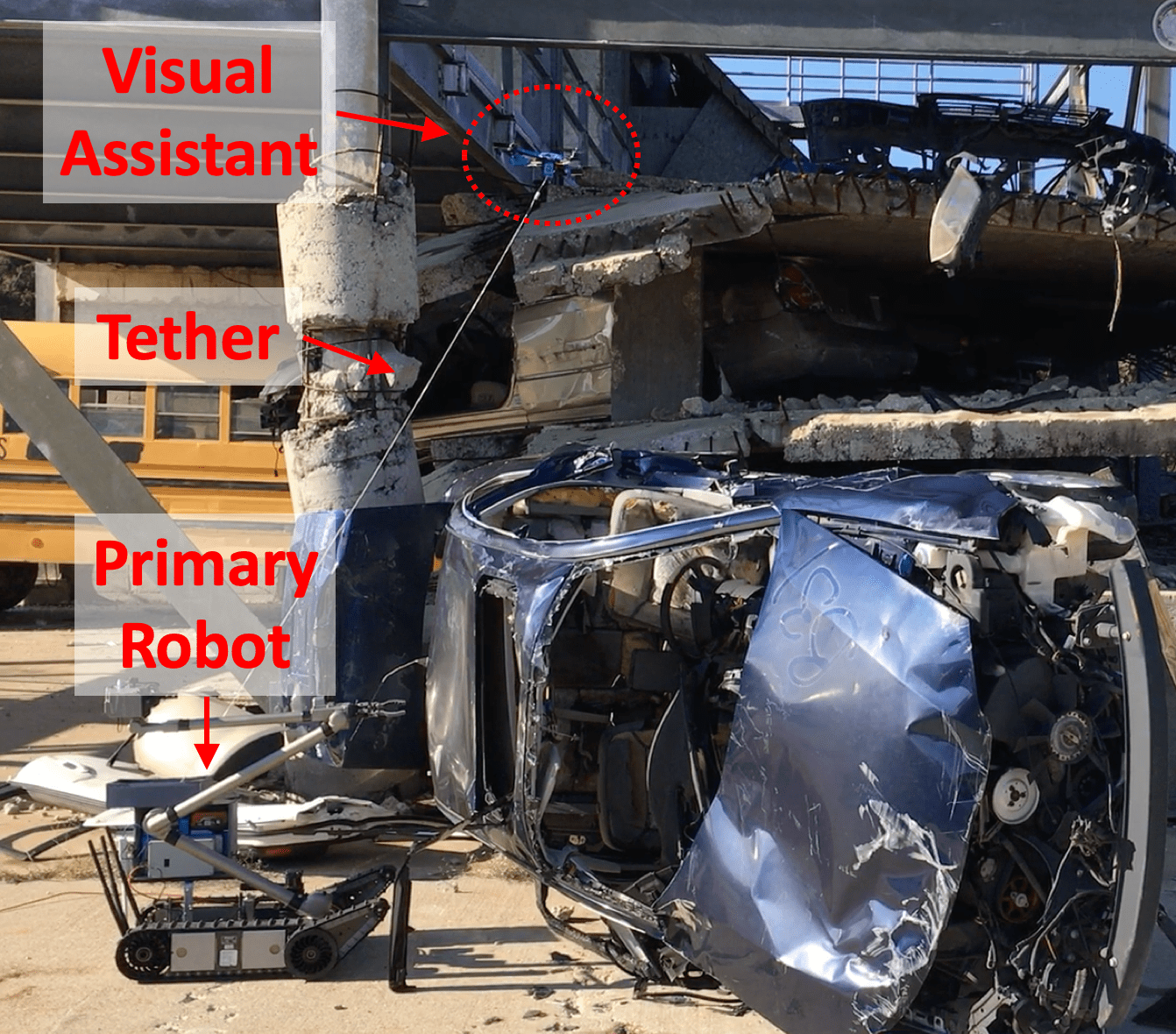
This UAV-UGV team is composed of Fotokite and Packbot. While Packbot is teleoperated by human operators to conduct search and rescue missions in unstructured or confined environments, e.g., after-disaster scenarios, Fotokite is tethered to Packbot and flies autonomously around it to provide the human operators with situational awareness of the remote scene through third-person view. Fotokite reasons about risk in those challenging environments, localizes itself only using the tethered without GPS or heavy visual computation, plans tether contact points with the environments, flies using tether-based motion primitives, and performs visual servoing of any moving point of interest. This XX-Bot team has been deployed in a training facility near the Fukushima Daiichi nuclear power plant. Involved Projects: [Tethered Visual Assistance]
|
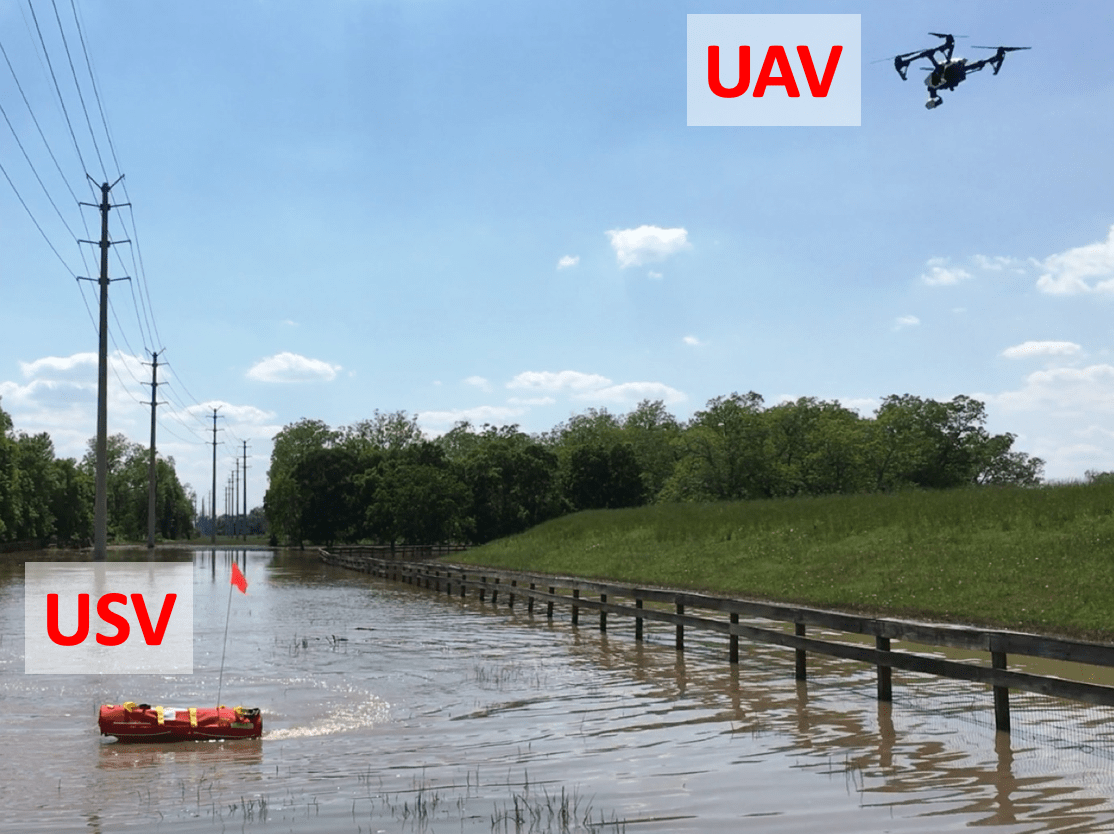
UAV-USV Team
|
This UAV-USV team is composed of Fotokite and Emily. Despite environment disturbances such as wind, Fotokite hovers stably in the sky, and provides visual feedback to Emily. Emily can then autonomously navigate to drowning victims in the water, improving rescue efficiency of human rescuers. This XX-Bot team has been deployed for marine mass casualty incident response in search and rescue exercises conducted by the United States Coast Guard and Galveston Fire Department during Summer Institute 2016 in Galveston, TX; Italian Coast Guard during 2016 exercise in Genoa, Italy; Brazos County Fire Department and Grimes County Emergency Management during Brazos Valley Search and Rescue Exercise 2017 in Gibbons Creek, TX; Los Angeles County Fire Department Lifeguards during 2017 exercise in Los Angeles, CA; and Department of Homeland Security during 2017 CAUSE V exercise in Bellingham, WA. Involved Projects: [Tethered Visual Assistance]
|