9 years, 4 months ago
/
Categories:
Research Highlights

9 years, 4 months ago
/
Categories:
Research Highlights
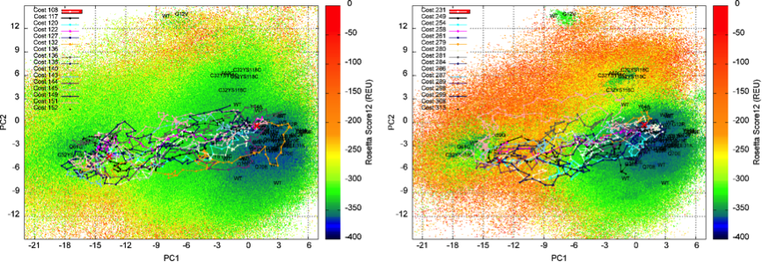
One of the research thrusts in the Shehu lab is understanding the modulation of biological activity in protein molecules via a process known as conformational switching. One of the ways we do so is by designing powerful, sample-based algorithms to extract a discrete representation of the conformational space of a protein and additionally model switching between conformations of interest.

9 years, 4 months ago
/
Categories:
Research Highlights
We present an open design for a small, $500 robot suitable for "swarm"-style multiagent research, mobile sensor communications exploration, robotics education, and other tasks.
9 years, 4 months ago
/
Categories:
Research Highlights
The Shehu lab is pushing the capability of evolutionary algorithms (EAs) to move beyond optimization and obtain comprehensive and detailed maps of complex, multi-modal energy landscapes.

9 years, 4 months ago
/
Categories:
Research Highlights
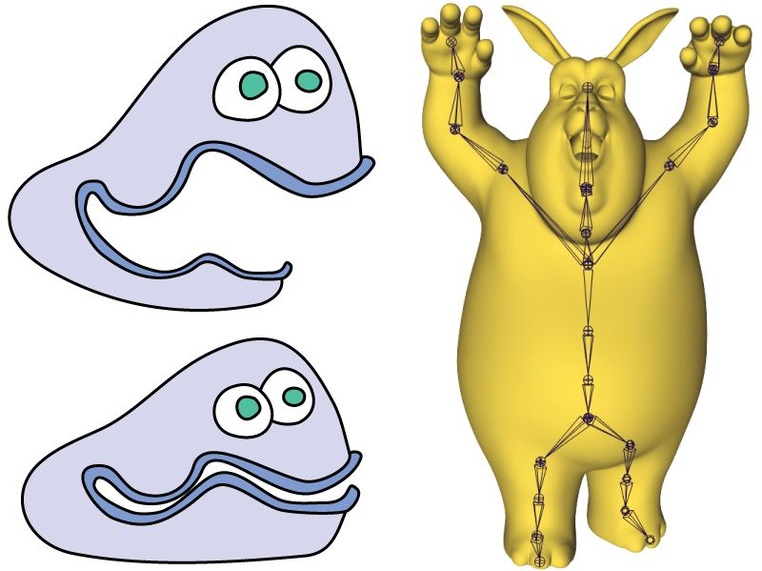
We are interested in learning part based representations of objects and object categories, which would enable efficient recognition and fast retrieval and ultimately lead to scalable object recognition systems.