9 years, 3 months ago
/
Categories:
Research Highlights
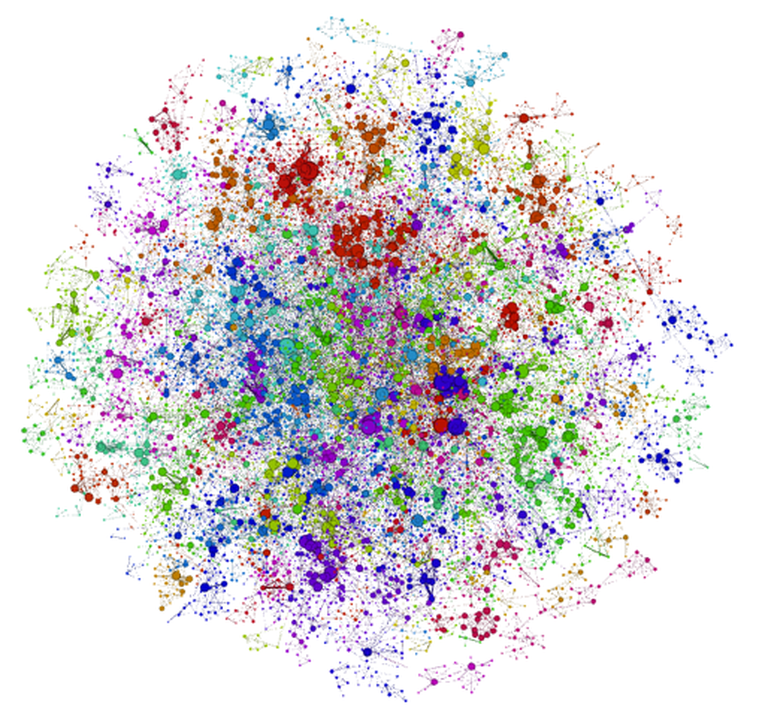
Community and topic detection in a research collaboration network from NSF awards granted by the Directorate for Computer and Information Science and Engineering (CISE) between January 1995 and August 2014.
9 years, 4 months ago
/
Categories:
Research Highlights
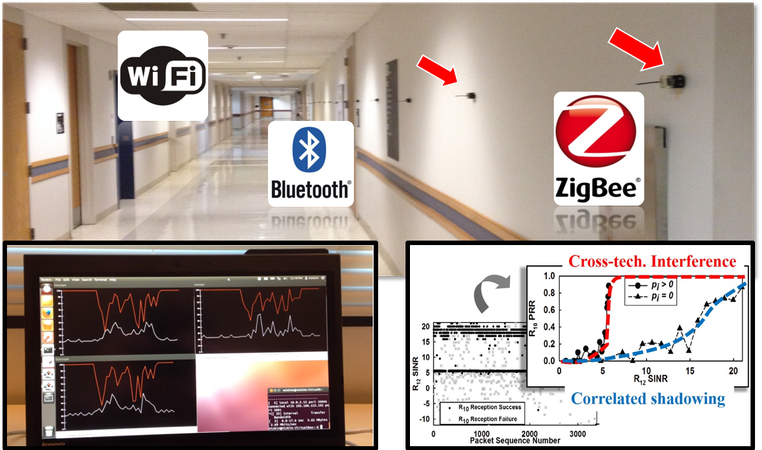
Professor Song Min Kim investigates on the interplay between wireless technologies, to effectively support massive-scale networks in the Internet of Things.

9 years, 4 months ago
/
Categories:
Research Highlights
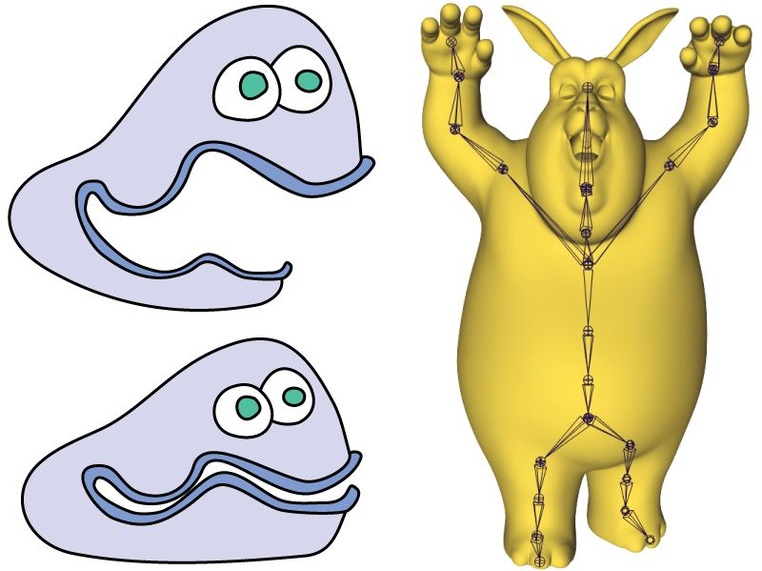
The laboratory for Games and Intelligent Animation (GAIA) focuses on research at the crossroads of animation, artificial intelligence, and psychology in the simulation of virtual humans for games, computer animation, and virtual environments.
9 years, 4 months ago
/
Categories:
Research Highlights

9 years, 4 months ago
/
Categories:
Research Highlights
One of the research thrusts in the Shehu lab is understanding the modulation of biological activity in protein molecules via a process known as conformational switching. One of the ways we do so is by designing powerful, sample-based algorithms to extract a discrete representation of the conformational space of a protein and additionally model switching between conformations of interest.